Magnetic-latching functionality is employed in products we come across everyday, even though the mechanism by which this technology functions isn’t something most people think about. Being an engineer, I always feel the need to research and understand how things work. Because I’m also a bit of a professor at heart, I would like to share the theory of operation and the differences between conventional solenoids and magnetic-latching solenoids. As a convenient frame of reference, this discussion will involve solenoids, which are used in locking mechanisms.
Conventional Electro-Magnetic Linear Actuators (Solenoids)
THEORY OF OPERATION:
Conventional Electro-Magnetic Linear Actuators (more simply referred to as Solenoids) include the following primary components: a coil, a body, a stop, and a moving component called an armature (plunger), all of which are depicted in Figure 1. Note: Figure 1 also depicts the presence of a return spring.
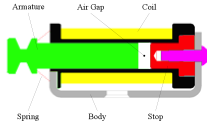
Figure 1: Conventional Solenoid, depicted in the “un-actuated” position
Solenoids are used to change the “state” of a locking mechanism from the locked to the unlocked position (or, from unlocked to locked, depending on the design of the mechanism). This change of state is accomplished by applying electrical energy to the solenoid coil. The electrical energy generates a magnetic field in the coil. This magnetic field then flows through the solenoid body, through the armature, through the stop, and across the air gap between the armature and the stop. As the magnetic force jumps the air gap, it creates a magnetic differential (an attractive magnetic force) between the armature and the stop. This magnetic force moves the armature toward the stop, thereby changing the state of the solenoid from the “un-actuated” position to the “actuated” position. In most applications, the armature comes into contact with the stop when in the actuated position. Because the armature is attached to the locking mechanism, the armature movement changes the state of the locking mechanism.
The armature will remain in the “actuated” position until the energy is removed from the coil. When energy is removed, the magnetic field rapidly decays, and some external force (typically a spring, as depicted in Figure 1) acts upon the armature to return it to the “un-actuated” position, thereby also changing the state of the locking mechanism.
Permanent-Magnet/Electro-Magnetic Linear Actuators
THEORY OF OPERATION:
A Permanent-Magnet/Electro-Magnetic Linear Actuator (Magnetic Latching Solenoid, or MLS) is similar in design to a conventional solenoid, except for the fact that the MLS has a permanent magnet embedded in the design (as depicted in Figure 2).
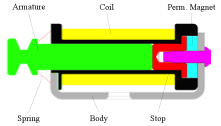
Figure 2: Magnetic Latching Solenoid, depicted in the “actuated” position
Just like a Conventional Solenoid, when a pulse of electrical energy is applied to an MLS coil, the resulting magnetic field will move the solenoid armature from the “un-actuated” position into the “actuated” position (the “latched” position is depicted in Figure 2). When applied to locking mechanisms, this armature movement serves to either lock, or unlock the system.
The difference between a Conventional Solenoid and a MLS device is the fact that, the electrical pulse of energy that is employed to move the armature into the “actuated” position can quickly be removed from the MLS coil. Even though the magnetic force that is generated by the coil quickly decays, the solenoid armature will remain in the “actuated” position due to the magnetic holding force that is created by the presence of the permanent magnet.
In effect, the permanent magnet “captures” the armature, thereby “Latching” the MLS in the “actuated” position.
In order to return the armature to its initial (“un-actuated”) position, the holding force of the permanent magnet must be nullified. This nullification is accomplished by passing a low level, “short pulse” of electrical energy through the solenoid coil.
The polarity of this “short pulse” of electrical energy must be opposite in polarity to the initial, much higher pulse of energy that moved the armature into the “actuated” position in the first place. Since this “reverse polarity” pulse is opposite to the polarity of the permanent magnet, it momentarily disrupts (nullifies) the magnet’s hold on the armature, thereby allowing the armature to “escape” the magnetic field of the permanent magnet.
In this regard, MLS devices are “bi-stable”, meaning, the armature will remain in either one position, or the other, until electrical energy is passed through the coil.
Two primary characteristics that create the Bi-Stabilizing nature of Magnetic-Latching Devices:
- The presence of the permanent magnet “stabilizes” the device by keeping the armature in the “actuated” position.
- The existence of a spring (or some other return mechanism) “stabilizes” the device by keeping the armature in the “un-actuated” position.
Equally important, only a short pulse of electrical energy is required to change the stability (i.e. the state) of an MLS device. This is particularly useful where either battery operated, or energy saving characteristics is desired.
The overall size of the MLS is dictated by the amount of magnetic force which must be generated by the coil in order to effect “actuation”. The larger the desired force of the return spring begets a commensurate increase in the size of the coil, an increase in the size of the permanent magnet (to ensure that the armature remains in the actuated position), and an increase in the overall dimensions of the MLS.
Equally necessary is a commensurate increase in the amount of electrical energy that must be applied to the coil (in order to move the armature into the “actuated” position), as well as in increase in the amount of energy required to nullify the hold force of a larger permanent magnet.
Magnet-Latching Solenoids and Magnetic-Latching Technology
As a leading manufacturer of standard, specialty and custom Electromagnetic devices—Electromechanical and Electrohydraulic—MSA’s advanced engineering, innovative design and lean manufacturing capabilities enable our customer’s products to outperform their competition.
To learn more about the advantages and typical applications of MLS, please check out our blog titled “Magnetic Latching Mechanisms”, or Contact MSA Today
By David Stockwell


Leave A Comment